Sea surface salinity measured by surface drifters
In the frame of the SMOS CAL/VAL program, surface drifters equipped with salinity sensors were deployed in two key regions in 2010. A set of 10 was deployed in the southwestern tropical Pacific Ocean, another set of 11 drifters in the Greenland-Iceland sea. The salinity sensor is mounted in about 50 cm depth below the surface floating sphere. The salinity data from this very shallow depth can help to validate the salinity data retrieved from the SMOS satellite's measurements. The depth of the satellite's measurements are only 2 cm so that the drifters' salinity data provide optimal in situ data for validation.
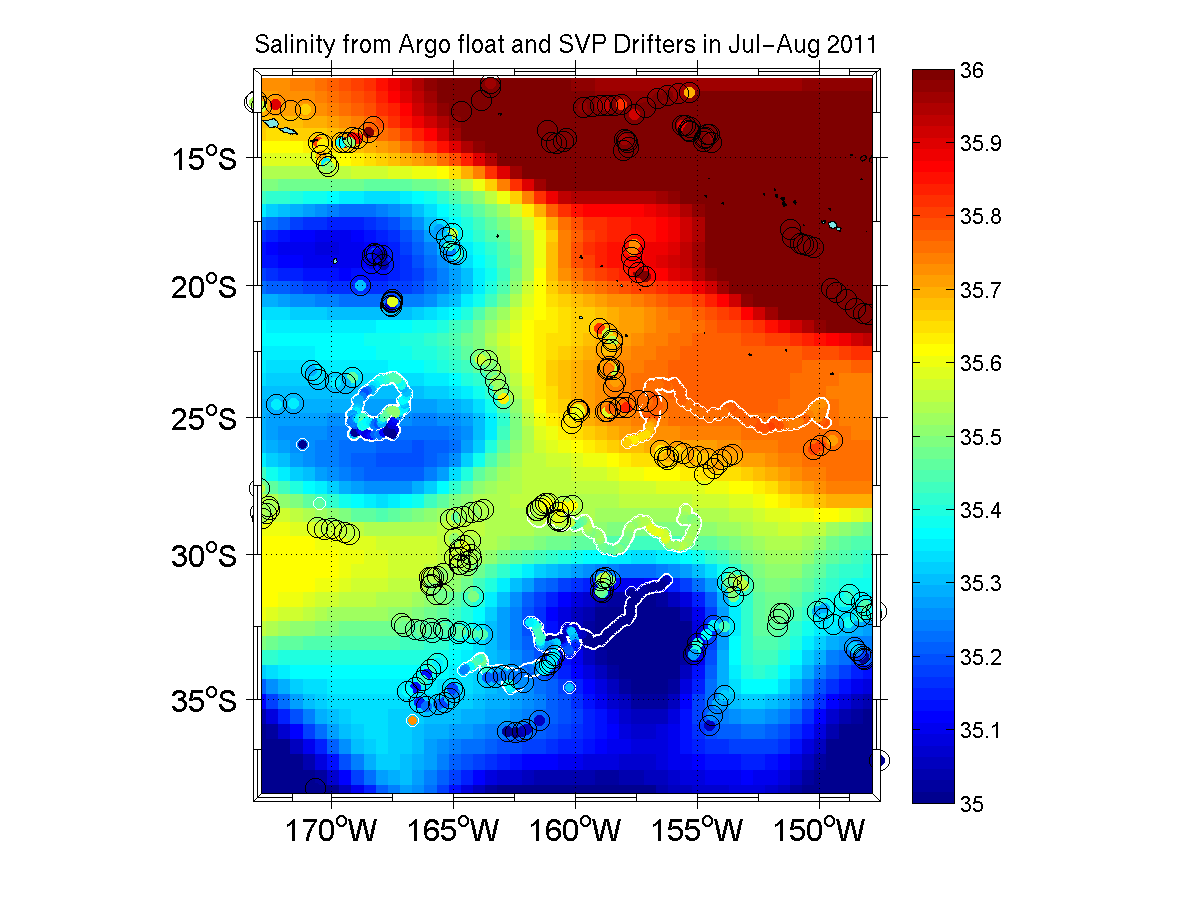
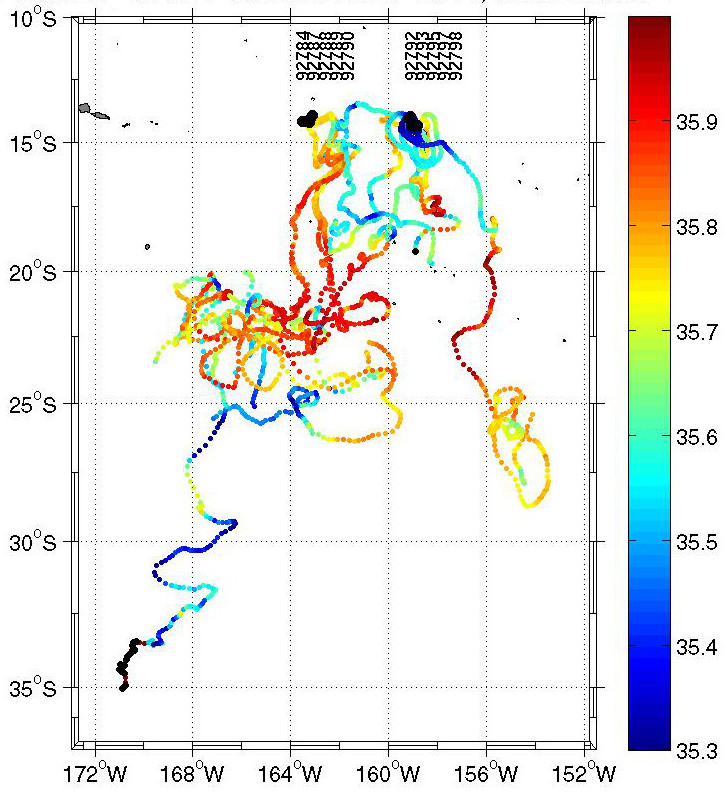
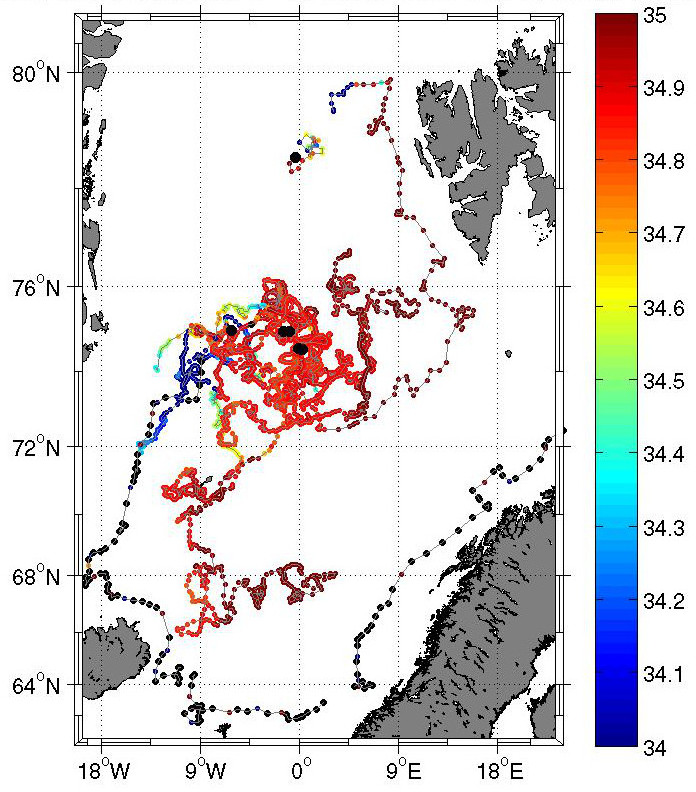
The figures below show the positions and measured salinity from the SVP surface drifters in the tropical Pacific (left) and the Greenland Iceland Sea (right).
 |
 |
The net sum of evaporation and precipitation changes the sea surface's salinity, however, precipitation mostly occurs only regionally and during several hours. Integrated in space and time, the precipitation will change the salinity of the ocean's upper mixed layer, but what is the time scale of mixing, and is SMOS capable to detect this intermediate low salinity patches? Is it possible to draw conclusions on the rain rate which is retrieved from other satellite measurements only with a high uncertainty? These are key questions in the SMOS related projects. First studies can be found under:
Rain‐induced variability of near sea‐surface T and S from drifter data, (Reverdin et al., 2012)
Sea surface salinity under rain cells: SMOS satellite and in situ drifters observations (Boutin et al., 2014)
Validation of salinity data from surface drifters (Reverdin et al., 2014)